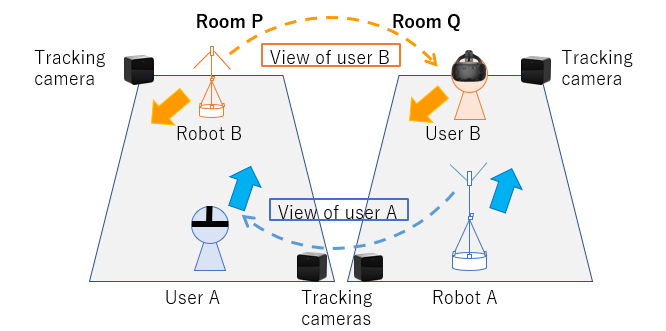
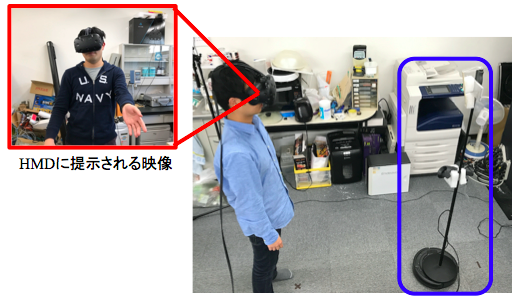
テレプレゼンスロボットを遠隔地の作業相手と同じ位置に存在させることにより、遠隔実世界協調作業(例えば異なる2地点にいる二人が同じ廊下ですれ違う)を実現しています。さらにテレプレゼンスロボットに人物映像をAR表示することで、人間とテレプレゼンスロボットのすれ違いを円滑にします。
発表文献
- Tomoo Inoue, Zijie Yuan, Remote Video Figure Achieves Smooth Cooperative Movement in a Bi-directional Telepresence Robot Environment, Collaboration and Technology, LNCS 11001, pp.91-104, doi>10.1007/978-3-319-63874-499504-5_8, Springer, 2018.9.